

- Activities & Events
- Activity Highlights
ACTIVITY HIGHLIGHTS
The Intelligent Positioning and Navigation Laboratory of The Hong Kong Polytechnic University Successfully Organized the Second Workshop on Trusted Navigation Control at IEEE ITSC 2023 Intelligent Transportation Conference
:
September 24-28, 2023
:
IEEE ITSC 2023
:
IPNL
:
Realizing trustworthy and safe navigation and control for complex urban environments remains a great challenge.
With the development of unmanned systems, including ground-based autopilots and low-altitude drones, we have entered a serious long-tail phase. In other words, existing navigation and control technologies have been able to solve most of the conventional scenarios, but achieving fully autonomous operation in complex urban environments remains a great challenge.
In this regard, IPNL, the Intelligent Positioning and Navigation Laboratory of the Department of Aeronautical and Aviation Engineering, Hong Kong Polytechnic University, together with a number of researchers and scholars from RWTH Aachen University, the renowned German Research Center, University of Chemnitz, Beihang University, Hong Kong University of Science and Technology, and Harbin Engineering University, have jointly organized a workshop on intelligent mobility at the ITSC 2023 (24-28 September 2023 Bilbao, Bizkaia, Spain) on "Intelligent Vehicles Meets Urban: Safe and Certifiable Navigation and Control for Intelligent Vehicles in Complex Urban Scenarios".
The aim of this Workshop is to explore safe and reliable navigation and control methods for intelligent vehicles in challenging urban scenarios. This is an important, but still heavily challenged, area of research. Such an exploration will greatly facilitate the large-scale deployment of intelligent vehicles in critical applications in urban areas. Finally, many thanks to our invited guests and the wonderful presentations they gave:
· Dr.-Ing. Daniel Medina, Integrity Monitoring for High Precision GNSS: the Road towards Reliable Outdoor Navigation
· Dr. Chen Zhu, Quantify the safety of navigation for urban air mobility
· Dr. Tim Pfeifer, Adaptive Estimation for Robust Perception
· Dr. Chen Zhuang, High-precision and reliable cooperative positioning for connected vehicles
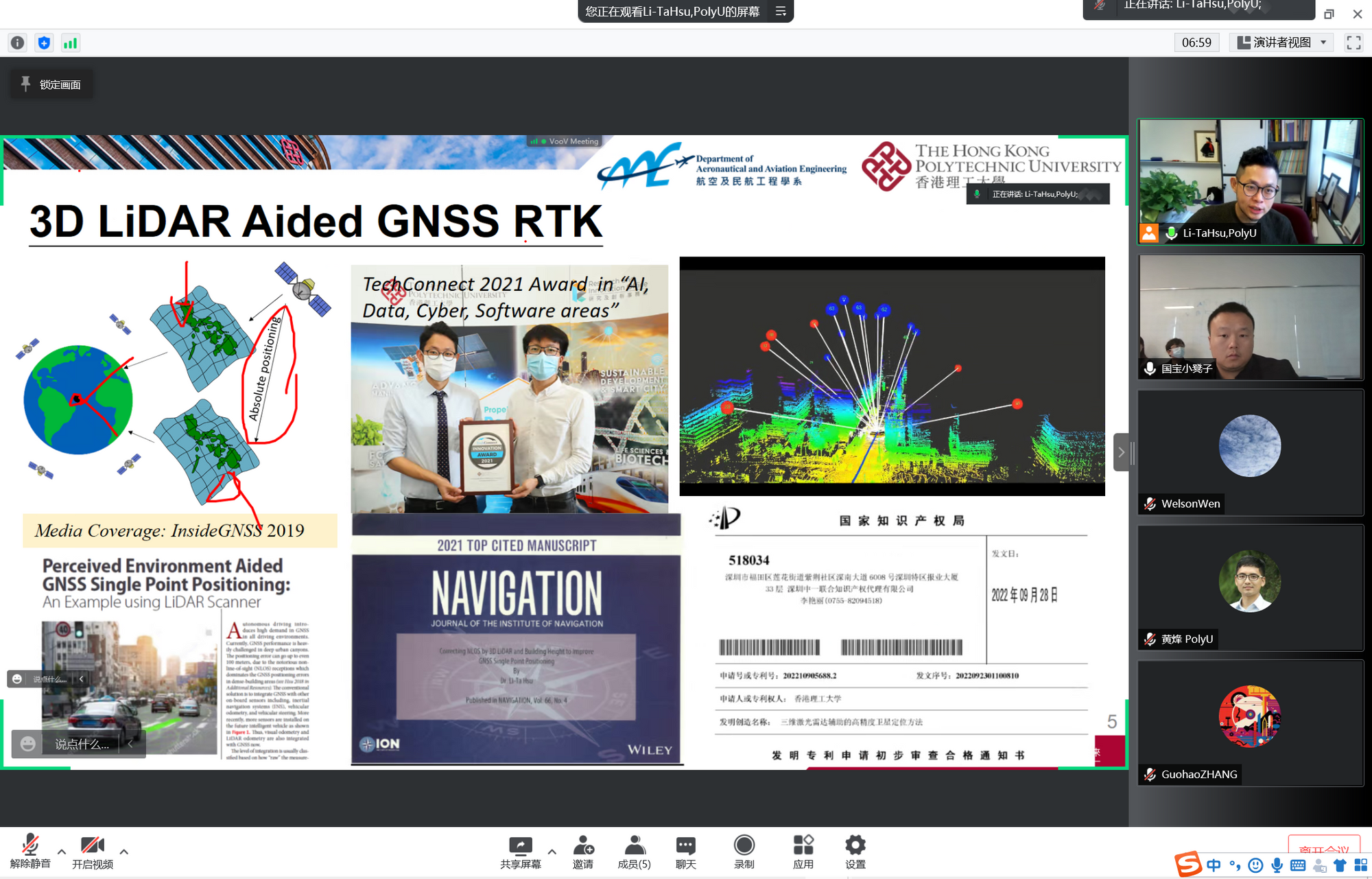
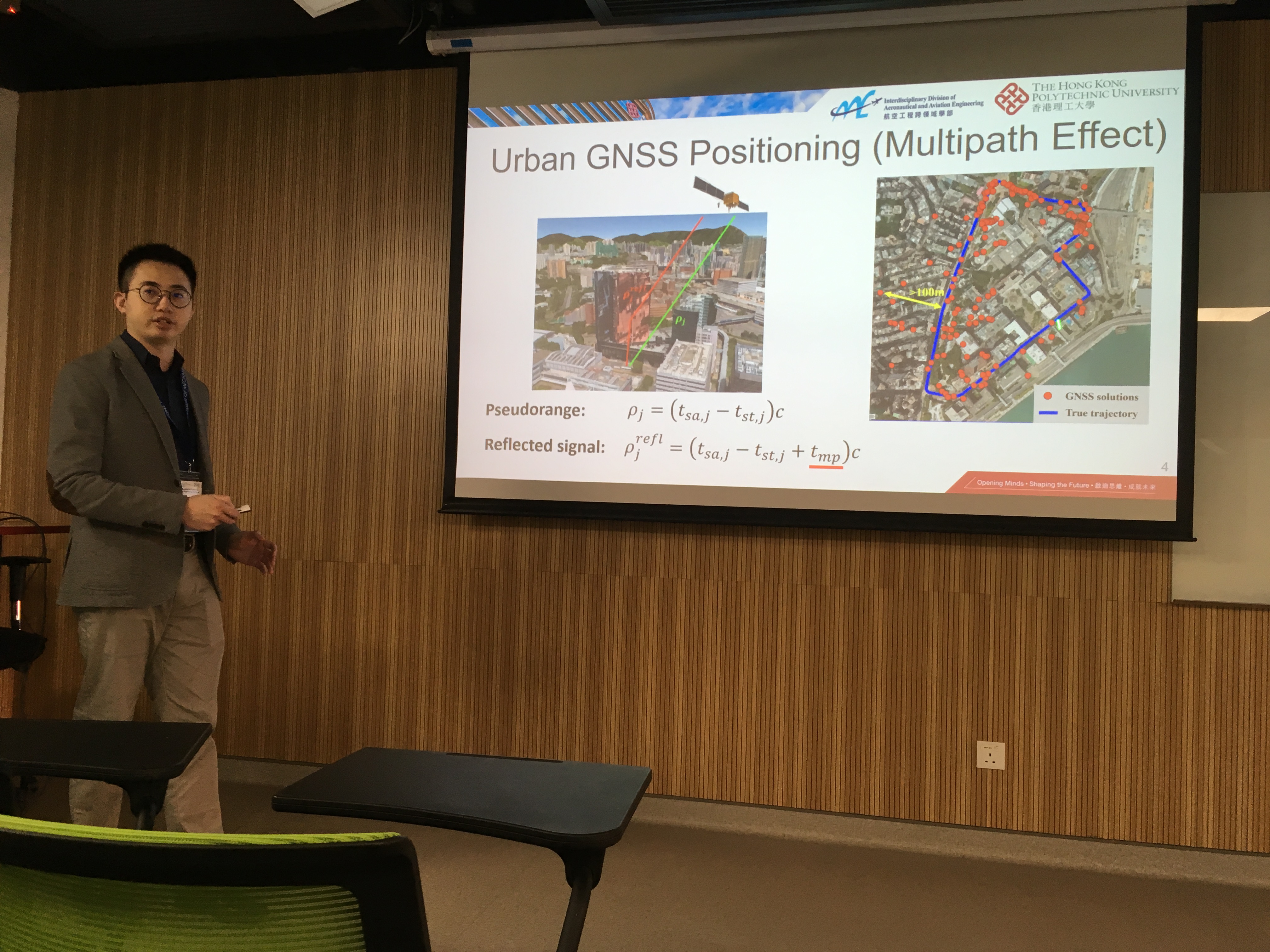
· Dr. Weisong Wen, 3D LiDAR Aided GNSS Positioning for Intelligent Vehicles in Urban Canyons
After the presentation, Haoming Zhang from RWTH Aachen University, Germany, moderated the discussion between the invited guests and the participants. The discussion was very lively and the audience was very inspired. Seven research papers in the field of urban control and navigation were accepted for this workshop, with authors from organizations such as Intel Labs (Germany), Hong Kong Polytechnic University and the Hong Kong Applied Science and Technology Research Institute (ASTRI). The authors gave excellent reports on the innovative approaches and experimental results presented in the articles during the workshop. In addition, our group shared the latest research results on autonomous driving localization and navigation based on networked vehicle-road collaboration in Hong Kong urban scenarios in collaboration with the Intelligent Mobility team of the Hong Kong Applied Science Research Institute (ASRI). This research is supported by the Hong Kong Transport Department and the Innovation and Technology Commission, aiming to promote the development of intelligent transportation through continuous and in-depth university-enterprise cooperation.
ITSC 2024 will be held in Edmonton, Canada, and we will continue to organize the 3rd "Intelligent Vehicle Meets Urban" workshop, hoping to discuss with scholars from home and abroad about the navigation and control of intelligent transportation under urban areas.
We look forward to meeting you all in Canada! Acknowledgements: We would like to thank those who participated in organizing this workshop, including Dr. Jiachen Zhang, Darren, Haoming, Wu jin, Prof. Yulong Huang, and others!
For more details about the workshop, please click on the workshop homepage: https://sites.google.com/view/ivurban2023itsc






Dr. Chaochung Peng visited IPNL
:
July 12-13, 2023
:
The Hong Kong Polytechnic University
:
IPNL
:
Thanks for Dr. Chaochung Peng to give a meaningful and constructive seminar with our research student.
Simultaneous Localization and Mapping (SLAM) technology has emerged as a fundamental component in
various applications, revolutionizing the way we perceive and interact with the world. SLAM technology is
a fusion of computer vision, sensor fusion, and robotics, enabling devices to simultaneously build a map of
an unknown environment while estimating their own location within it. By leveraging different sensors
such as cameras, LiDAR, inertial measurement unit (IMU), and kinematics odometry, SLAM algorithms are
capable of creating accurate and dynamic maps or models in real-time. This ability has opened up
countless possibilities across different fields. One of the most prominent applications of SLAM technology
lies in autonomous navigation systems. Self-driving cars heavily rely on SLAM to perceive their
surroundings, understand the environment, and plan their trajectories. By integrating SLAM algorithms
with advanced control systems, vehicles can navigate complex road networks, detect obstacles, and make
informed decisions in real-time, ensuring safer and more efficient transportation. Beyond autonomous
vehicles, SLAM plays a vital role in robotics. Robots or unmanned aerial vehicles (UAVs) equipped with
SLAM capabilities can navigate and interact with unknown environments, making them highly adaptable in
domains such as warehouse automation, industrial inspection, architectural engineering, and search and
rescue operations. By employing SLAM algorithms, robots/UAVs can efficiently explore and map unfamiliar
territories, detect objects of interest, changes of terrain, and perform tasks with precision and autonomy.
This talk will aim to delve into the fundamentals of SLAM technology, highlighting its significance and
broad range of applications.

Dr. Guoquan HUANG visited IPNL
:
June 20-21, 2023
:
The Hong Kong Polytechnic University
:
IPNL
:
Thanks for Dr Guoquan HUANG to give a meaningful and constructive seminar with our research student.
As cameras and IMUs are becoming ubiquitous, visual-inertial systems for high-precision 3D motion
estimation hold great potentials in a wide range of applications from metaverse to autonomous vehicles, in part
because of the complementary sensing capabilities
and the decreasing costs and size of these sensors. While visual-inertial navigation, alongside
with SLAM, has witnessed tremendous progress in the past decade, yet certain critical aspects
in the design of visual-inertial systems remain poorly explored, hindering the widespread
deployment of these systems in practice. In this talk, I will present some recent research efforts
of my group on advancing the state of the art of visual-inertial navigation and perception,
which include OpenVINS, robocentric VIO, Schmidt-EKF for visual-inertial SLAM, visual-inertial
depth learning and object tracking, semantic object SLAM, and so on. Many of the codebases
have been open sourced to promote visual-inertial estimation and learning, thus broadly
benefiting the whole community.

GNSS for Highly Reliable applications Seminar
:
March 20, 2023
:
The Hong Kong Polytechnic University
:
IPNL
:
Thanks for Dr Nobuaki Kubo to give a meaningful and constructive seminar with our research student.
GNSS is becoming a global social infrastructure. In addition, as the world accelerates
toward autonomous moving platforms, GNSS, which is the key to position estimation, is required
to be more reliable and secure. In the past a few years, cm-class high-precision positioning
has begun to become commonplace, and the trend toward higher reliability and safety is steadily
accelerating. Against this background, our team has focused on the development of reliable
RTK-GNSS, prediction of RTK-GNSS, detection method of interference/spoofing, and integration
of GNSS/IMU/Odometer. As for this integration, integrity monitoring for moving platform is also
key issues. In addition, low earth orbit satellites will be discussed in terms of how
they can augment GNSS.

Online Meeting with Navigation Team from SAIC
:
November 4, 2022
:
The Hong Kong Polytechnic University
:
IPNL
:
We have a very insightful online meeting with the navigation team from SAIC(中国上汽集团)on data
collaboration on 4 November 2022. We discussed about cooperation for multi-sensor integration using FGO.
Looking forward to making impact to the autonomous driving industry using our navigation research!

ASTRI visited IPNL lab
:
October 26, 2022
:
The Hong Kong Polytechnic University
:
IPNL
:
The team from ASTRI (Hong Kong Applied Science and Technology Research Institute Company Limited)
visited IPNL lab on 24 October2022. We discussed several ideas for the potential collaboration on Urban
Sensing and Navigation with Intelligent Infrastructure.


Certificate Awards Ceremony in IPN Lab
:
August 31, 2022
:
The Hong Kong Polytechnic University
:
IPNL
:
Dr. Li-Ta Hsu issued certificates to cite students or staff members for their excellent performance
in projects on 31 August 2022. Including Dr. Guohao ZHANG, Ivan NG., Haosheng XU., Xikun LIU., Xiwei
Bai., Feng HUANG., Yihan ZHONG., Dr. Liang ZHANG. and Jiangchong CHANG.



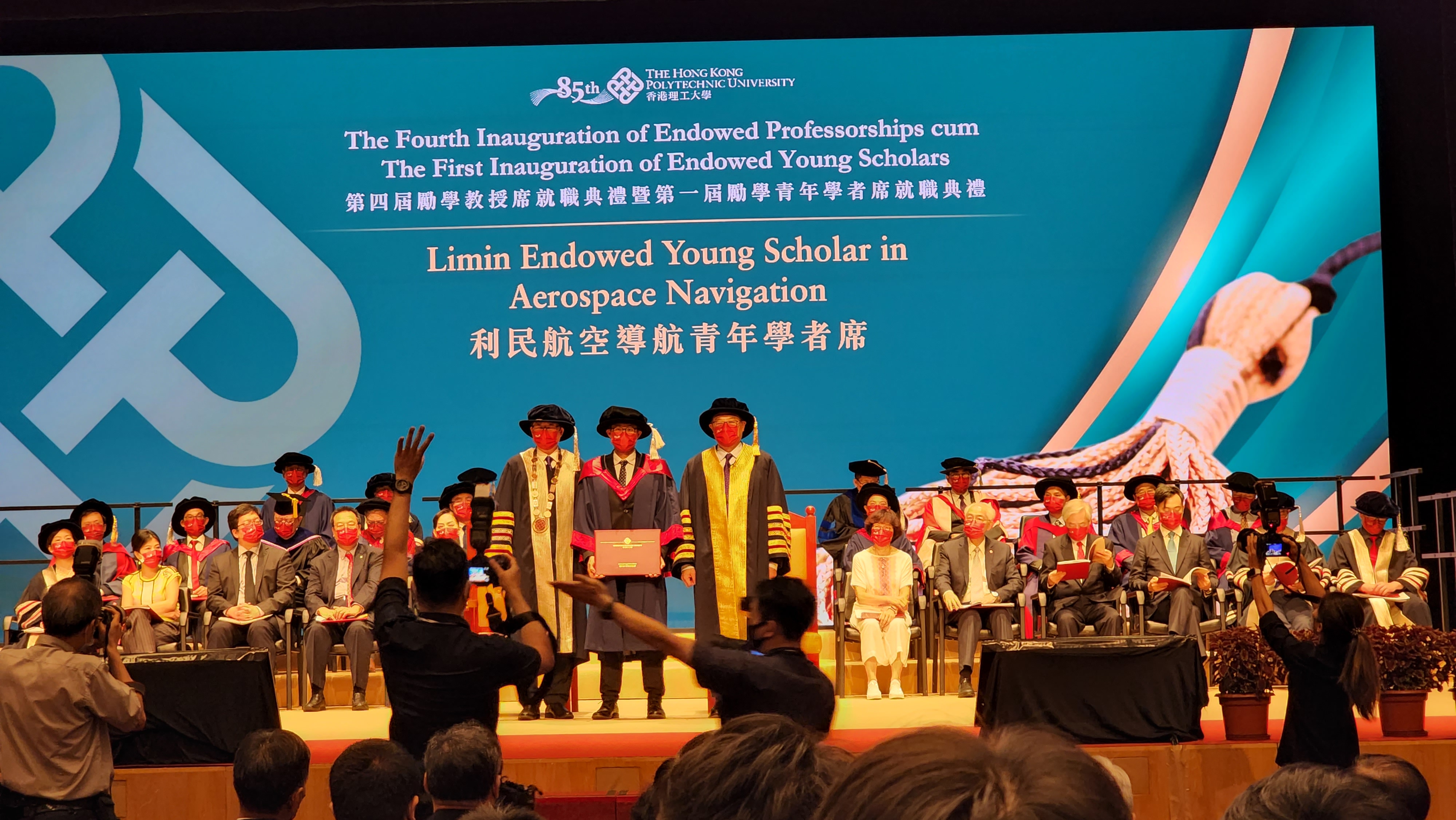
The First Inauguration of Endowed Young Scholars
:
August 31, 2022
:
The Hong Kong Polytechnic University
:
Aerospace Navigation
:
Congratulations to Dr Li-Ta Hsu for obtaining Limin Endowed Young Scholar position in Aerospace
Navigation! The inauguration ceremony took place on 31 August 2022.


Happy Halloween!
:
November 30, 2021
:
Party room
:
IPNL
:
We had a cool costume party last November!

Cheung Chau Gathering
:
March 22, 2022
:
Cheung Chau
:
IPNL
:
We had a delightful and relaxing day in Cheung Chau on Sep. 25, 2021. Tasty seafood and yummy
barbeque. That was so sick!





UrbanLoco: A New Challenge for Urban Mapping and Localization
:
March 30, 2020
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
For any mapping or localization researcher in the age of autonomous driving, it is hard to achieve
the goal in the deep urban. As Positioning satellites are blocked, camera/LIDARs are occluded, and even
inertia sensors are drifting over time! Luckily, there is still hope: the data. To fix this missing link
between urban localization and algorithm development, we are sharing with the community our UrbanLoco
Dataset. See below blog:
https://medium.com/@ourxxbluesky/urbanloco-a-new-challenge-for-urban-mapping-and-localization-200742ea7629

Our UrbanLoco dataset is published in the ICRA 2020 e-conference!
:
May 20, 2020
:
e-conference
:
ICRA
:
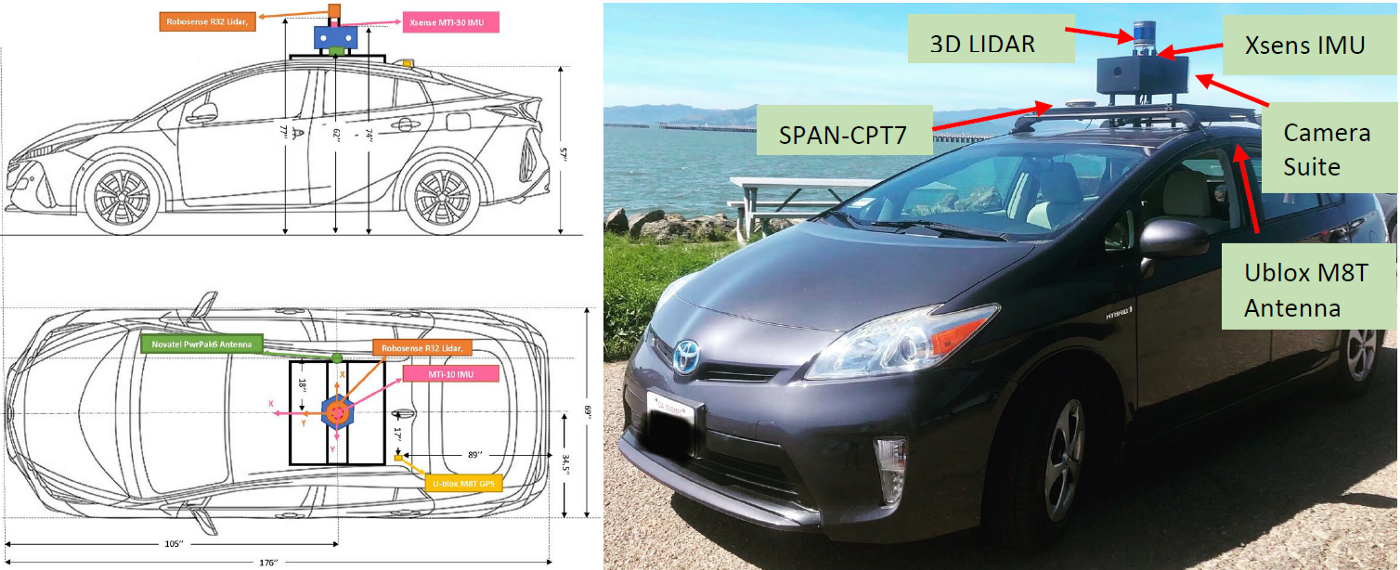
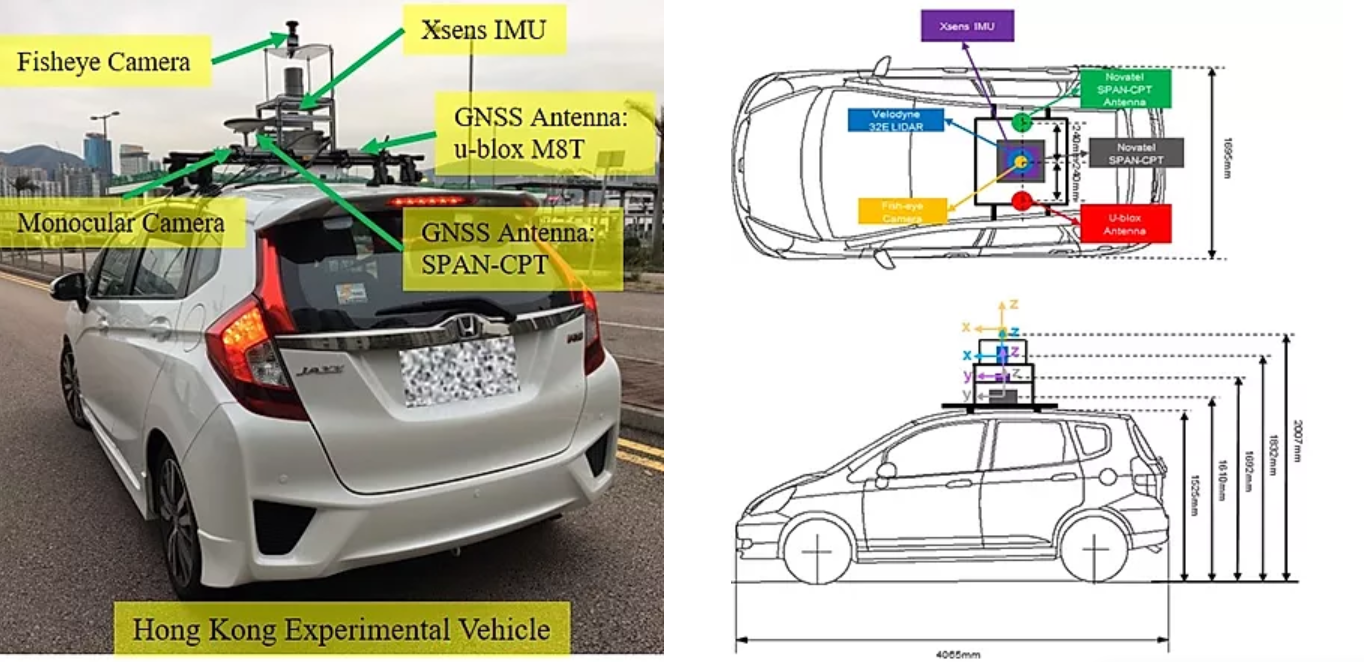
Mapping and localization is a critical module of autonomous driving, and significant achievements
have been reached in this field. Beyond Global Navigation Satellite System (GNSS), research in point
cloud registration, visual feature matching, and inertia navigation has greatly enhanced the accuracy
and robustness of mapping and localization in different scenarios. However, highly urbanized scenes are
still challenging: LIDAR- and camera-based methods perform poorly with numerous dynamic objects; the
GNSS-based solutions experience signal loss and multipath problems; the inertia measurement units (IMU)
suffer from drifting. Unfortunately, current public datasets either do not adequately address this urban
challenge or do not provide enough sensor information related to mapping and localization. Here we
present UrbanLoco: a mapping/localization dataset collected in highly-urbanized environments with a full
sensor-suite. The dataset includes 13 trajectories collected in San Francisco and Hong Kong, covering a
total length of over 40 kilometers. Our dataset includes a wide variety of urban terrains: urban
canyons, bridges, tunnels, sharp turns, etc. More importantly, our dataset includes information from
LIDAR, cameras, IMU, and GNSS receivers. Now the dataset is publicly available through the link .

UrbanLoco: A New Challenge for Urban Mapping and Localization
:
March 30, 2020
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
For any mapping or localization researcher in the age of autonomous driving, it is hard to achieve
the goal in the deep urban. As Positioning satellites are blocked, camera/LIDARs are occluded, and even
inertia sensors are drifting over time! Luckily, there is still hope: the data. To fix this missing link
between urban localization and algorithm development, we are sharing with the community our UrbanLoco
Dataset. See below blog:
https://medium.com/@ourxxbluesky/urbanloco-a-new-challenge-for-urban-mapping-and-localization-200742ea7629
First prize in Qianhai-Guangdong-Macao Youth Innovation and Entreprineurship competion!
:
December 06, 2019
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
Guangdong-Macao Youth Innovation and Entreprineurship competion
:
Weisong Wen joined the Guangdong-Macao Youth Innovation and Entreprineurship competion with the
topic of " Low-cost and Accurate Localization Solution for
Autonomous Vehicles " and got the first prize in Hong Kong region.



Dr Li-Ta Hsu is now a topic editor in MDPI Sensors Journal
:
November 06, 2019
:
-
:
MDPI
:
The main of responsibilities of Topic Editors are:
1. Setting up at least one Special Issue (SI) over two years in the journal and proposing a detailed
strategy plan for the SI (including soliciting papers, promoting the SI, etc.);
2. Promoting the journal during conferences (adding 1-2 slides into your presentation, distributing
flyers, recommending the journal to your colleagues, etc.);
3. Providing support for the Special Issues on topics related to your expertise or when the guest
editor(s) is not available, including SI promotion via social media, pre-checking new submissions,
making decisions, and giving advice on some scientific cases, etc.
"Real-time & Multi-sensor Mobile Mapping Systems for ITS Applications" on Remote Sensing
:
November 06, 2019
:
-
:
Remote Sensing
:
Dr Li-Ta Hsu is a guest editor of Special Issue "Real-time and Multi-sensor Mobile Mapping Systems
for ITS Applications" on Remote Sensing published MDPI. The special issue will close on May 2020.
https://www.mdpi.com/journal/remotesensing/special_issues/ITS_rs
Dr LT Hsu gives a comment self-driving cars reported by South China Morning Post
:
October 16, 2019
:
-
:
South China Morning post
:
Dr Li-Ta Hsu gives a comment on the next challenge of self-driving cars during the interview with
the South China Morning Post (SMCP) reporter, Tracy Qu. The article is reporting a startup company
focusing on the autonomous driving and titled "This German start-up tackles the next challenge in
self-driving cars: anticipating unpredictable human behaviour."
The link:
https://www.scmp.com/tech/start-ups/article/3031601/german-start-tackles-next-challenge-self-driving-cars-anticipating
Dr Li-Ta Hsu gives a comment that he learnt from Dr Ramsey Faragher who is a founder and CEO of Focal
Point Positioning Ltd.
The abstracted report is given below:
“A human behaviour data set will be a great aid in the current development phase of self-driving cars,”
said Li-Ta Hsu, assistant professor at the Hong Kong Polytechnic University, whose research work
includes autonomous driving. “People spend [their first] 18 years learning social rules to be able to
pass a driving test. Current autonomous cars don’t have that level of social understanding.”
Fruitful Trip to ION GNSS+, Miami, Florida, US
:
September 16 - 20, 2019
:
Miami, Florida
:
ION
:
Dr Li-Ta Hsu is selected as one of the Peer Reviewers Recognized with Bouquets* of Red Pencils on
ION GNSS+ 2019
* The individuals were recognized as people who demonstrated outstanding contributions to the Institute
this past year in their role as a peer reviewer who selflessly provided quality and timely reviews when
called upon to do so.





IPNL has the first retreat @ Xiyong Shenzhen, China
:
July 21-23, 2019
:
Xiyong Shenzhen
:
IPNL
:
The very first IPNL retreat takes place in Xiyong Shenzhen, China. It is a 3 days 2 night trip. We
bbq in the first night, swim in the second day and play cards and have seafood in the second night. In
overall, it is very happy and successful. We look forward to the next one in 2020.







Dr Taro Suzuki, Chiba Institute of Technology, Japan, visits IPNL
:
July 10, 2019
:
The Hong Kong Polytechnic University
:
The Hong Kong Polytechnic University
:
Dr Taro Suzuki, who is from Chiba Institute of Technology, Japan, visits IPNL. He gives a seminar
talk on “How to Improve GNSS Accuracy in Urban Environments?”
Several ideas were discussed for the potential collaboration. Dr Taro Suzuki will jointly submit a paper
on IF level GNSS simulator with IPNL and the paper will be presented in ION ITM 2020.

Dr Li-Ta Hsu now is a technical representative and council member in ION
:
January 01, 2019
:
-
:
-
:
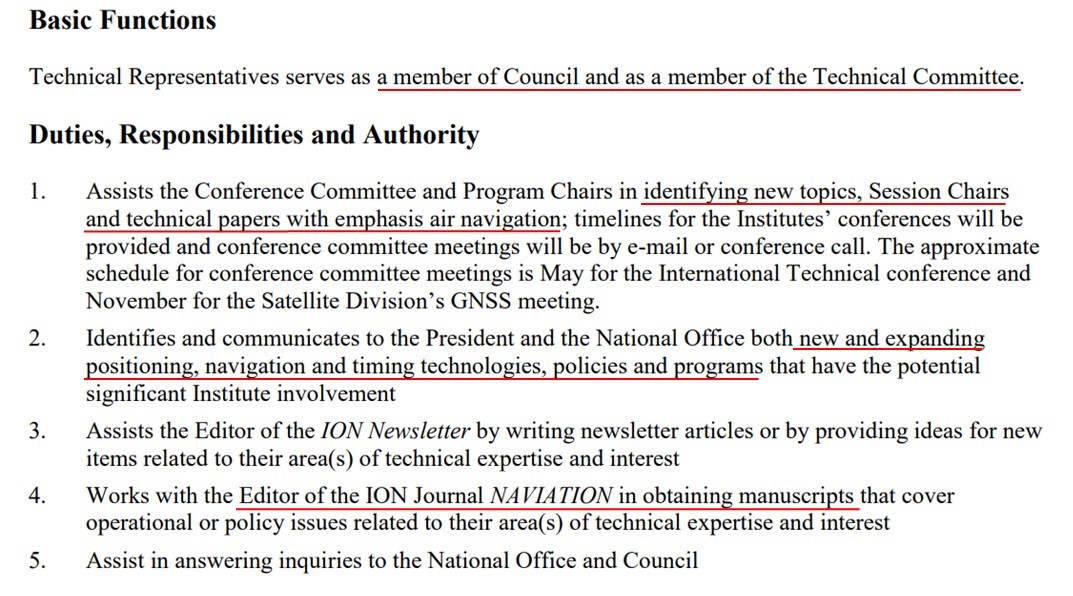
Dr Li-Ta Hsu now is a technical representative and council member in ION. His term is from 2019 to
2021. The role of the technical representative is shown below.

8th Asia MAE Workshop, PolyU, Hong Kong
:
December 02, 2018
:
The Hong Kong Polytechnic University
:
The Hong Kong Polytechnic University
:
Dr Li-Ta Hsu chairs the navigation, guidance and control session on the 8th East Asia Mechanical and
Aerospace Engineering Workshop. Mr Weisong Wen, Mr Guohao Zhang and Mr Sai Hu present their work.
Guohao ZHANG won the Best Presentation Award in a session of ION GNSS+ 2018
:
September 26, 2018
:
UCL
:
ION GNSS+
:
Mr. Guohao ZHANG (our PhD student) won the Best Presentation Award in the session of ION GNSS+ 2018,
Miami, Florida, US. He presented his paper “Collaborative GNSS Positioning with the Aids of 3D City
Models.” The completed version of this research is now available on GPS Solutions.

Guohao ZHANG attends GNSS Summer School, Tokyo, Japan
:
July 30, 2018
:
GNSS Summer School, Tokyo, Japan
:
Tokyo University of Marine Science and Technology
:
Mr. Guohao ZHANG the scholarship and attend the GNSS summer school in Tokyo University of Marine
Science and Technology.
Weisong WEN win Excellent Project Award of Songshan Lake Innovation & Entrepreneurship
:
Jan 12, 2018
:
Dongguan, Guangdong, China
:
Songshan Lake
:
Mr Weisong WEN represents HKPolyU PN lab to participant and win the Excellent Project Award of Songshan
Lake Innovation and Entrepreneurship Competition, Dongguan, Guangdong, China. His project on "Lane-level
navigation system for autonomous driving vehicle" is regarded as one of the most commercializable
solution for autonomous driving applications.

Keynote speech at ICASE, Islamabad, Pakistan
:
November 13-17, 2017
:
ICASE, Islamabad, Pakistan
:
ICASE
:
Dr Li-Ta Hsu is invited by Institute of Space Technology (IST), Islamabad, Pakistan and he gives a
keynote speech on “Modernized Satellite Navigation for Civil Aviation and Autonomous Vehicle” on Fifth
International Conference on Aerospace Science and Engineering (ICASE).



The fundamental of GNSS
:
July 30 - August 04, 2017
:
GNSS Summer School, Tokyo University of Marine Science and Technology
:
Tokyo University of Marine Science and Technology
:
Dr Li-Ta Hsu is invited by IPNTJ gives a 6 hours lecture on “The fundamental of GNSS” in GNSS Summer
School at in Tokyo University of Marine Science and Technology

BACK TO TOP